
Autoware Demo
Autoware Demo
AutoWare에서 제공하는 Demo를 돌려보는 것을 목표로 한다.
DataDownload
Autoware에서 제공하는 Demo를 돌리기 위해서는 2개의 Demo data가 필요하다.
- Download the sample 3D pointcloud/vector map data:
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz - Download the sample ROSBAG data (LiDAR: VELODYNE HDL-32E, GNSS: JAVAD GPS RTK Delta 3):
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
좀 더 많은 Data를 가지고 Autoware의 Simulation환경을 작동시키고 싶으면 아래 링크를 참조하자.
참조: ROSBAG Store
Demo RUN
위에서 2개의 Data를 Download를 ~/Dwonload Directory에 받았다고 가정하고 Demo를 실행하여 본다.
Demo RUN은 다음의 과정을 거친다.
1. Create the .autoware directory and extact the demo data inside.
.autoware Directory를 생성 후 ~/Download Directory안의 Data를 옮겨온다.
cd ~
mkdir .autoware
cd .autoware
cp ~/Downloads/sample_moriyama_* .
tar zxfv sample_moriyama_150324.tar.gz
tar zxfv sample_moriyama_data.tar.gz
2. RUN Autoware
cd autoware.ai
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
단 User를 Root로 하여서 실행하였을 경우에는 Error가 발생하면서 작동되지 않는다.
위의 명령어로 인하여 AutoWare를 실행하게 되면 다음과 같이 AutoWare Runtime Manager(ARM)를 작동시킬 수 있다.
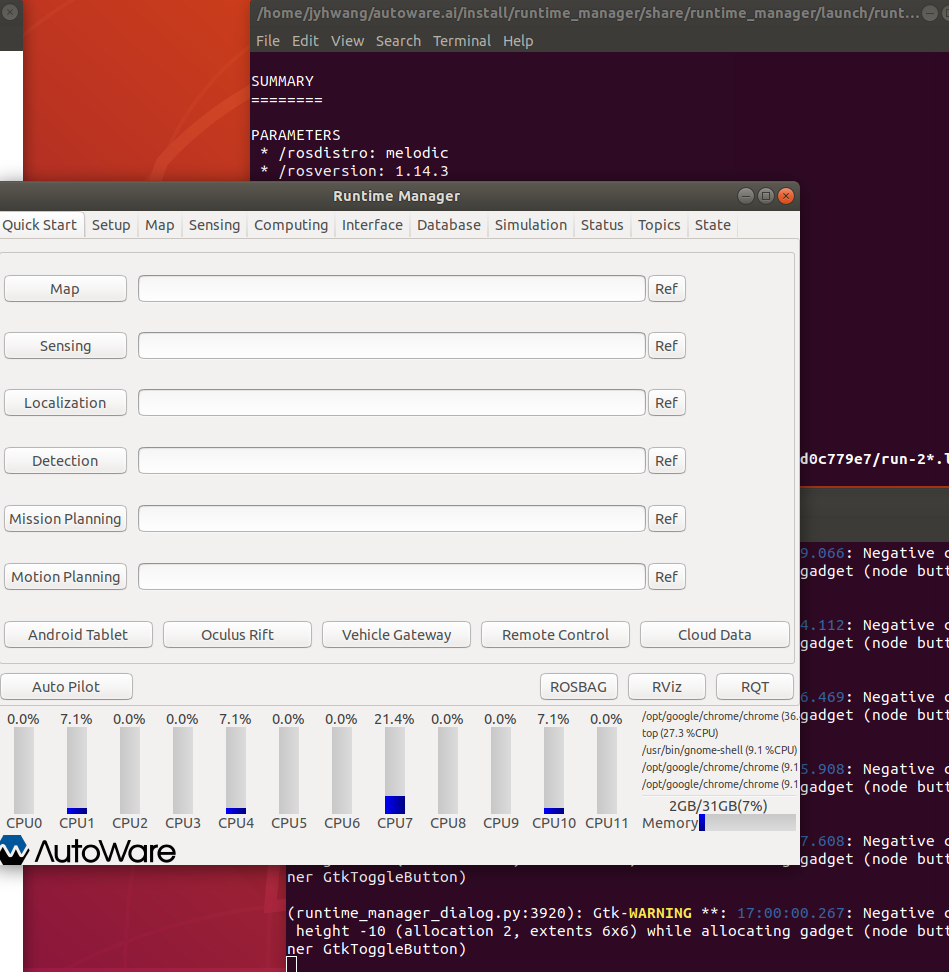
3. ARM 조작
1. File 불러오기
위와 같은 사진처럼 ARM을 실행시킬 수 있으면 거의다 성공하였다고 할 수 있다.
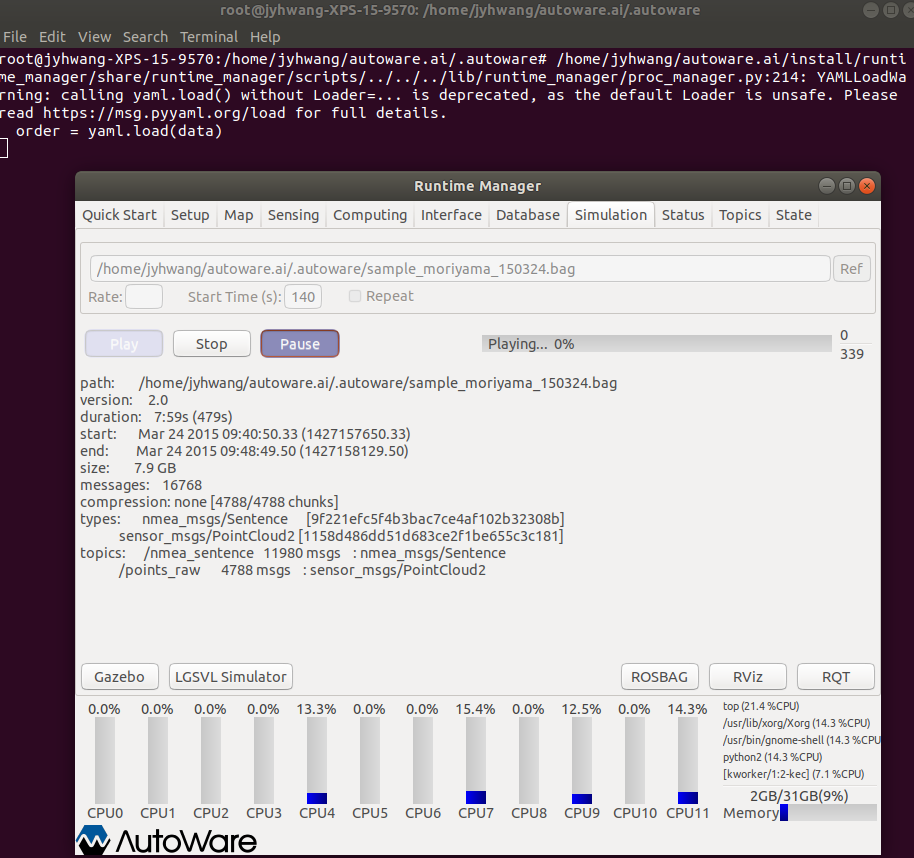
Autoware Demo를 실행시키기 위하여 다음과 같은 과정이 필요하다.
Simulation Tab 선택 -> Ref누른 뒤 압축해제한 sample_moriyama_150324.bag 선택 -> StartTime 140 설정 -> Play -> Pause
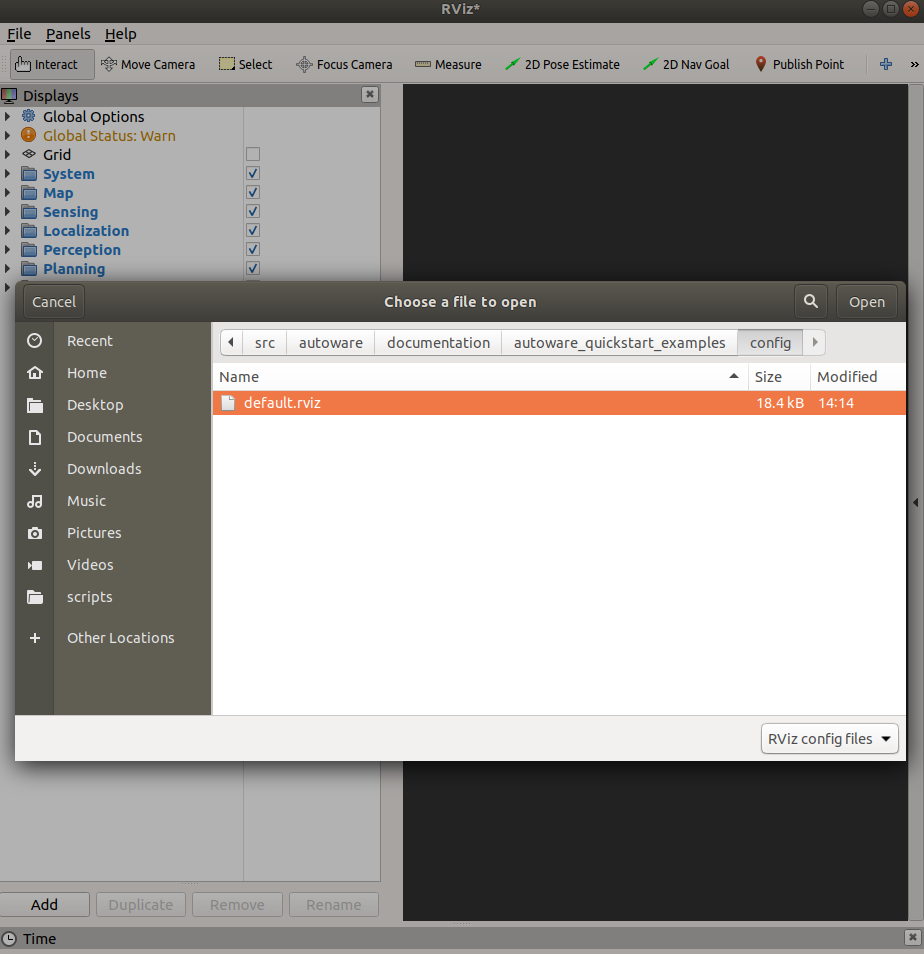
2. RVIZ 실행
ARM 우측 상단에 RViz 클릭 -> File -> Open Config 클릭
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz선택
3. Launch 적용
ARM 왼쪽 상단에 Quick Start 클릭
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/에서 해당되는 각각의 .launch File Mappling

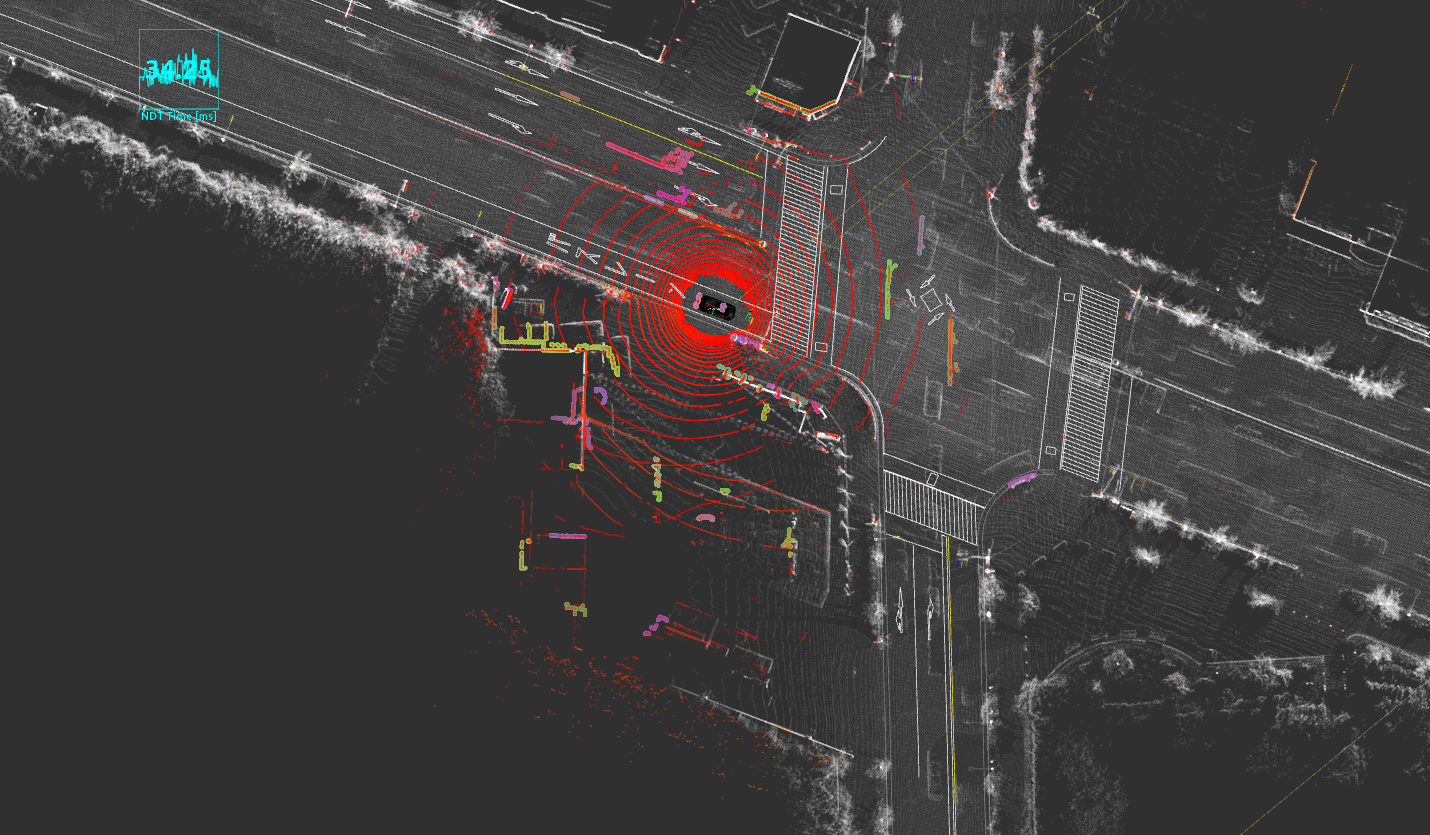
4. RVIZ 재실행
RVIZ를 Pause를 해제하면 아래와 같은 결과를 얻을 수 있다.
참조: Autoware 정식 사이트
문제가 있거나 궁금한 점이 있으면 wjddyd66@naver.com으로 Mail을 남겨주세요.
Leave a comment