
ROS(1)
LiDAR Institute 세미나에 대한 내용을 정리한 것 입니다.
자율주행 요소기술
자율주행 요소 기술로서 크게 4개로서 구별을 하였다.
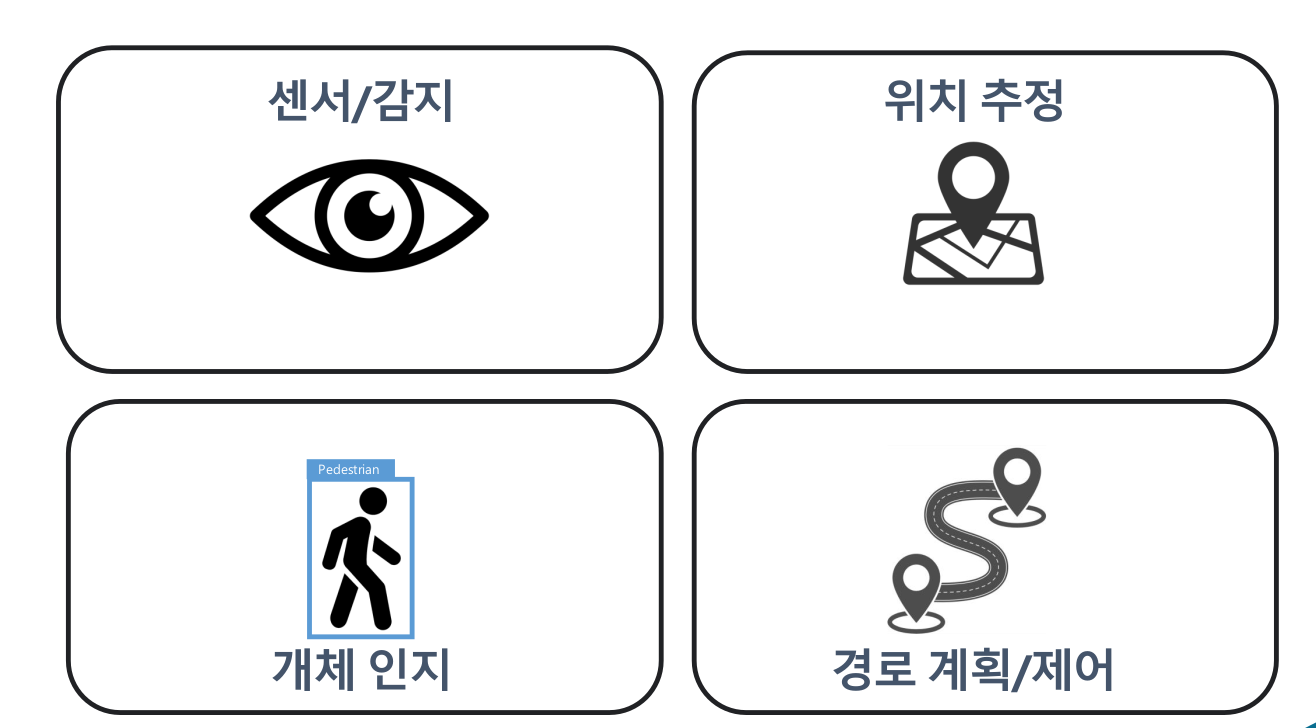
사진 출처: LiDAR Institute 세미나
여기서 이번 세미나에서는 개체 인지 쪽에서의 DeepLearning과 다른 분야에서는 LiDAR를 활용하여 어떻게 자율주행 요소 기술을 적용하였는지에 대해 알아보는 세미나 이다.
사전사항으로서 다음과 같은 HW Spec과 Software가 요구된다.
HW Spec
- OS: 64-bit Ubuntu Linux 18.04 LTS 권장
- Processor: 1.8 GHz Intel64 or AMD 64 (X86_64 compatible processor) processor 이상
- Memory: 8 GB RAM.
- Graphics: 최소 OpenGL compatible 1280 x 960 display, NVIDIA GeForce GTX 960 2GB 이상 권장
- Storage: 30 GB available space.
Soft Ware
- ROS Melodic 설치: 설치 방법
참고사항(LiDAR)
LiDAR는 Light Detection And Ranging(빛 탐지 및 범이 측정) 또는 Laser Imagint, Detection and Ranging(레이저 이미징, 탐지 및 범위 측정)의 약자로 펄스 레이저를 목표물에 방출하고 빛이 돌아오기까지 걸리는 시간 및 강도를 측정해 거리, 방향 속도, 온도, 물질 분포 및 농도 특성을 감지하는 기술이다.

실습
위의 사전사항을 만족하고 다음과 같은 명령어로 인하여 LiDAR를 실습하게 된다.
현재 몇몇 사항은 사전측에서 미리 준비해둔 Setting으로 진행하므로 직접 구동하거나 실습하는데에는 무리가 있을 것으로 예상됩니다.(LiDAR의 가격이 2000만원 가량이라고 합니다.)
실습 1 ROS 패키징 생성하기(C++)
(1) C++ 언어로 개발할 수 있는 ROS 패키지를 생성합니다.
catkin_create_pkg creating_ros_pkg_cpp roscpp
참고사항으로 위에서 사용한 명령어는 다음과 같다.
catkin_create_pkg: Package를 생성한다.creating_ros_pkg_cpp: Package의 이름을 지정한다.roscpp: 설치할 Package를 정의한다.(C++ 예제이므로 roscpp 사용)
(2) 생성한 패키지 폴더 안의 CMakeLists의 내용을 알맞게 변경합니다.
(3) 실행할 cpp File을 생성한다. (File의 위치와 실행할 File의 이름을 CMakeLists에 작성하여야 실행된다.)
(4) src위의 Directory에 접속하여 Build를 실행한다. catkin_make
(5) 실제 동작을 확인한다.
실습 2 ROS 패키지 생성하기 (Python)
위의 실습 1과 전부 동일하나 다른것은 (1) C++ 언어로 개발할 수 있는 ROS 패키지 생성에서 C++이 아니라 Python Package를 설치한다. catkin_create_pkg creating_ros_pkg_python rospy 나머지는 위와 작업이 동일하다.
실습 3 LiDAR 실행하기
(1) 기본적인 실습 1,2 와 동일한 과정을 거칩니다. 주어진 Souce를 File에 지정하여 넣고 Build를 실시하여야 합니다.
(2) ip를 LiDAR와 통신할 수 있게 설정한다.
(3) source를 통하여 Build를 수행한 파일을 추가한다. source ./devel/sartup.bash
(4) rospack profile을 통하여 실제 Direcory 가 잘 추가되었는지 확인합니다.
(5) 실제 추가한 Directory에 맞는 File을 실행하여야 합니다. roslaunch arg1 arg2
- arg1: 실제 src File안에 실행시킬 Directory
- arg2: src/arg1/launch 안에서의 launch File 이름
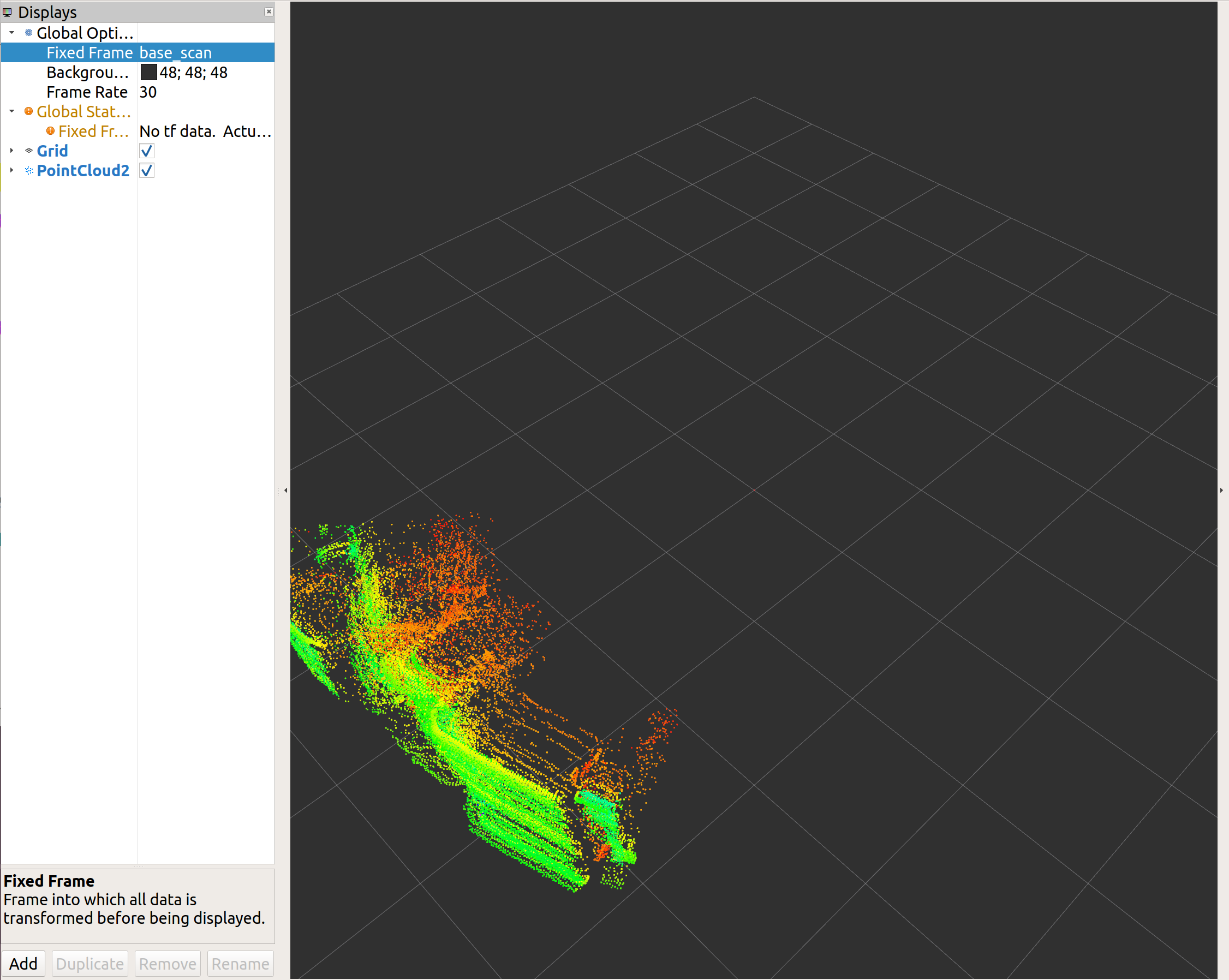
(6) 시각화를 위하여 RViz를 실행 후 Point Cloud Data를 추가한다.
실습 4 Dyamic Object Detection

LiDAR Point cloud
(1) 제공해준 File Build catkin_make
(2) LiDAR Point Cloud File 실시
- resource 실행
- SL LiDAR rviz 실행
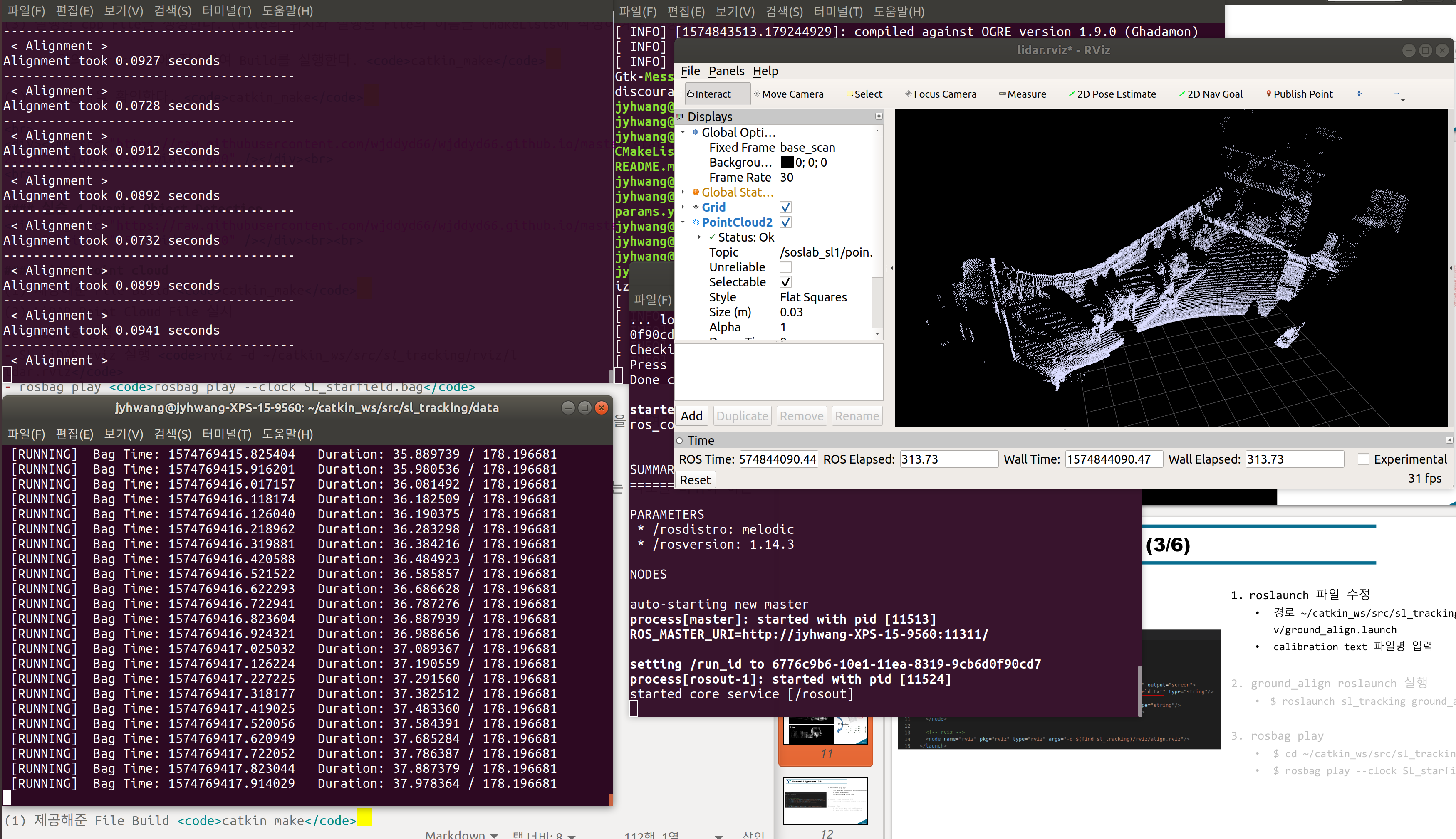
rviz –d ~/catkin_ws/src/sl_tracking/rviz/l idar.rviz - rosbag play
rosbag play --clock SL_starfield.bag
직접 LiDAR를 통하여 실시간 Data를 받와와서 실행하는 것이 아닌 미리 저장되어있는 bag File을 보여주는 작업이다.
Ground Alignment
실제 LiDAR는 정면을 찍는 것이 아닌 위에서 아래를 바라보는 방향으로 진행하기 때문에 관측하는 각도를 바꿔야 하는 작업이다.
간단한 회전변환으로 이루워진다.
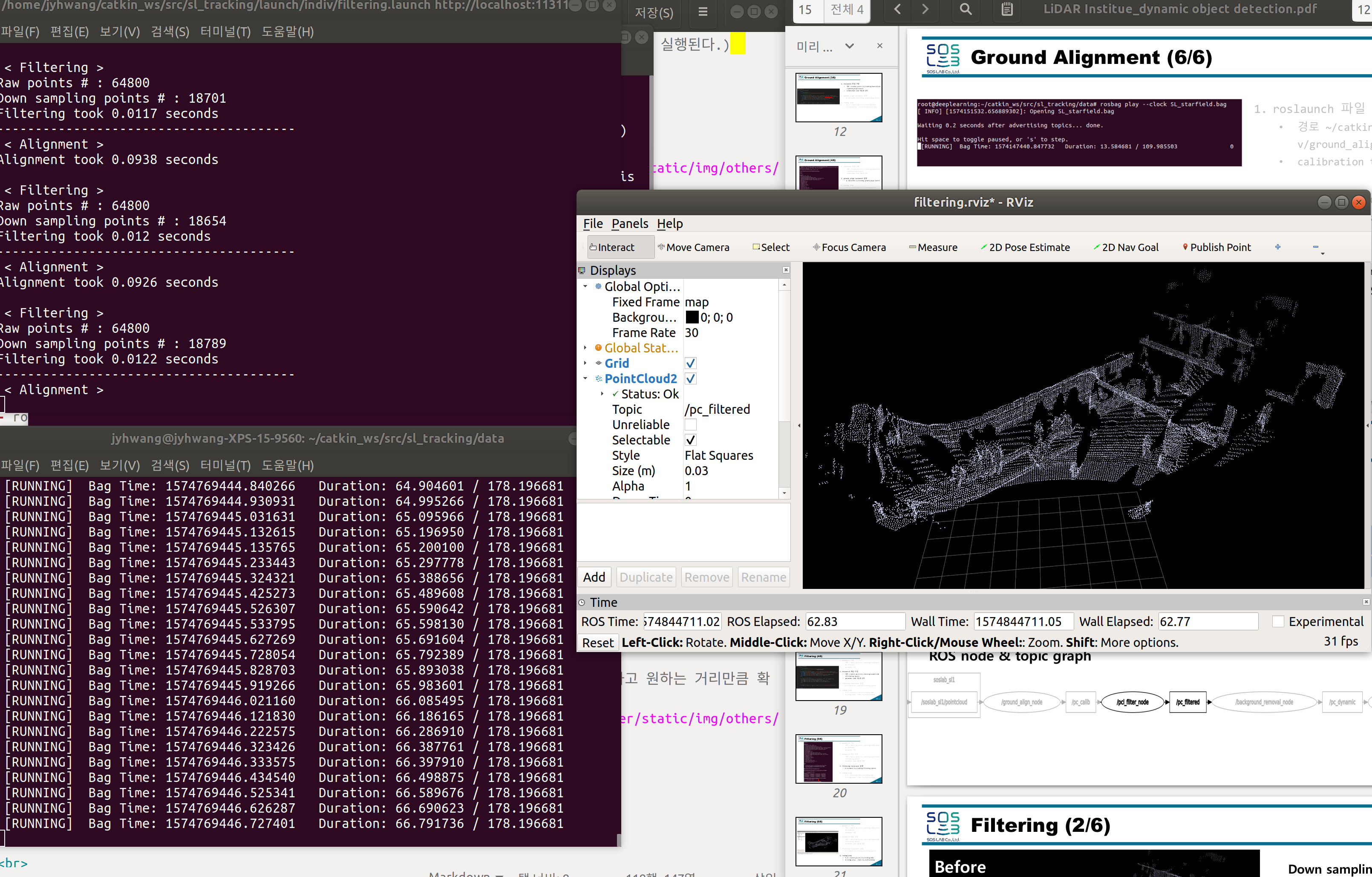
앞으로의 작업은 3개의 Terminal에서 진행되며 각각의 Terminal은 다음과 같은 역할을 합니다.
- Terminal1: 실제 Data를 받아들일 .bag File을 실행시킵니다.
- Terminal2: 실제 받아들인 Data를 Filtering을 거치게 합니다. 즉 .bag File의 Data를 Algorithm을 거친 뒤의 값으로 변환시킵니다.
- Terminal3: Terminal2에서의 값을 rviz를 통하여 실제로 확인합니다.
Filtering
Voxel grid filter, Distance filter를 사용한다.(Uniform 하게 Data를 DownSampling을 하고 원하는 거리만큼 확인할 수 있다.)
또한 ROS의 Filtering의 Parameter들은 .yaml File로 제공하여 손쉽게 바꿀수 있게 바꾸었다.
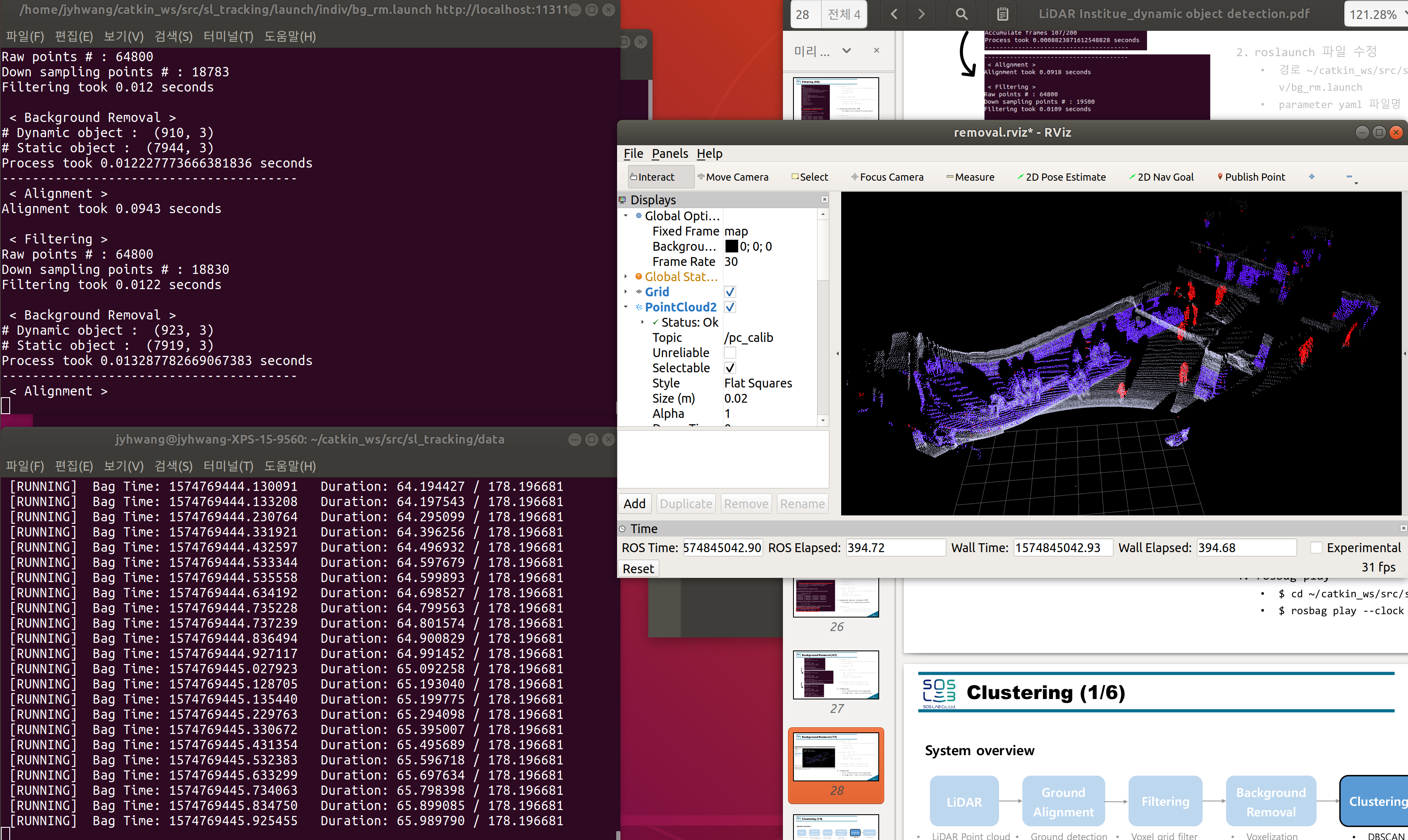
Background Removal
OpenCV-비디오 처리에서도 언급하였던 움직이는 Object를 추출하기 위하여 일정 Frame동안에서 움직인 Object를 확인 즉 Frame의 값이 바뀐것을 확인하여 Object를 추출하는 방법이다.
각각의 Parameter는 검출하고자 하는 Object의 특성에 맞게 조정하여 Detection하게 된다.
아래 사진을 보게 되면 움직이지 않는 물체는 파란색으로, 움직이는 물체는 빨간색으로서 표시하게 된다.
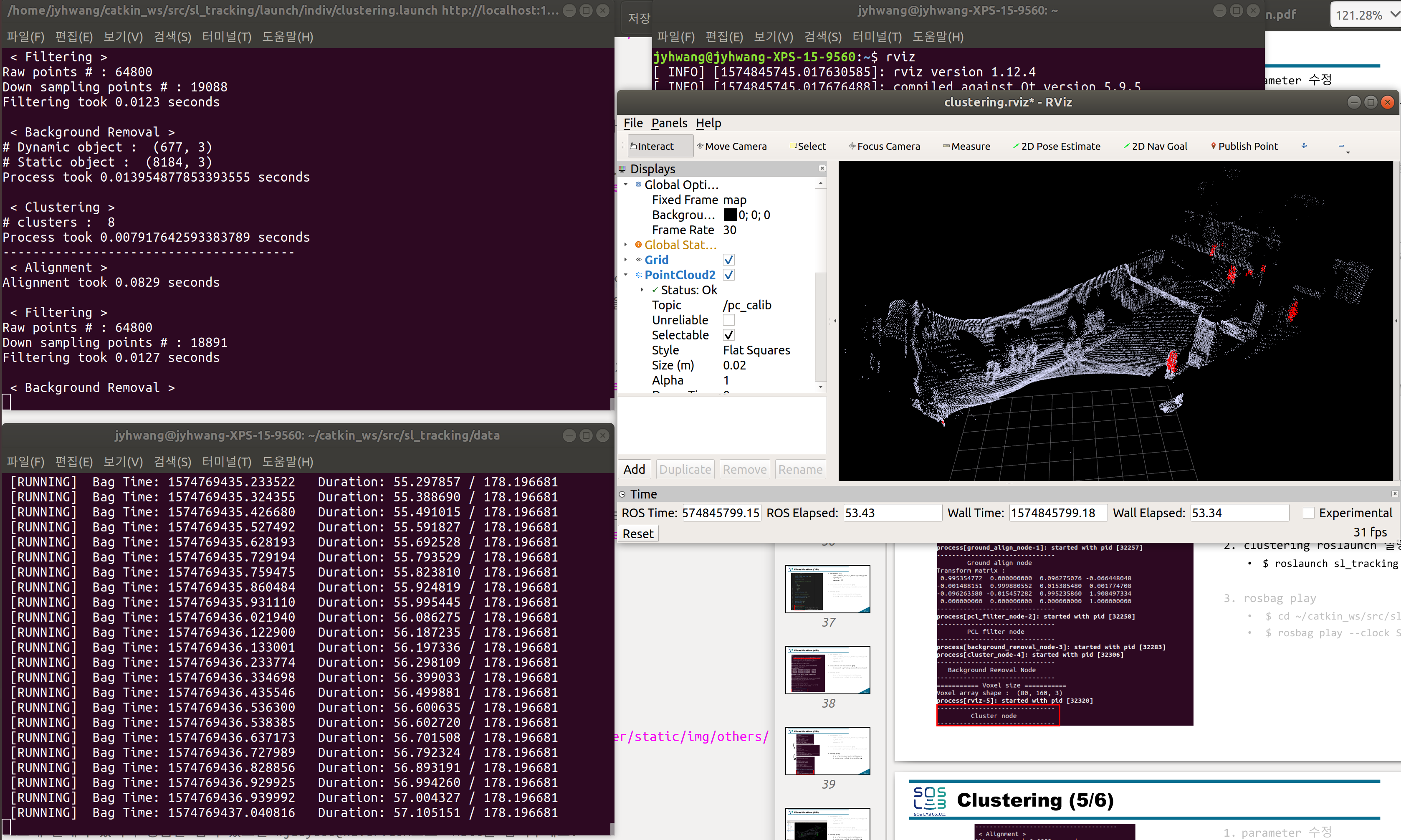
Clustering
K-means를 사용하지 않고 DBSCAN을 사용하여 Clustering을 실시한다.
Clustering을 기준 Object를 기준으로 묶게되어서 의미없는 Noise는 없어지게 되는 효과가 나타나게 된다.
DBScan을 통하여 많은 Computing Power가 소모될 것이라고 생각하였지만, 위에서 Background Removal에서부터 확인한 빨간색 Pixel에 대하여 즉, 움직이는 Object에 관하여 DBSCAN을 사용하게 되므로 연산에 소요되는 시간을 매우 낮출 수 있다
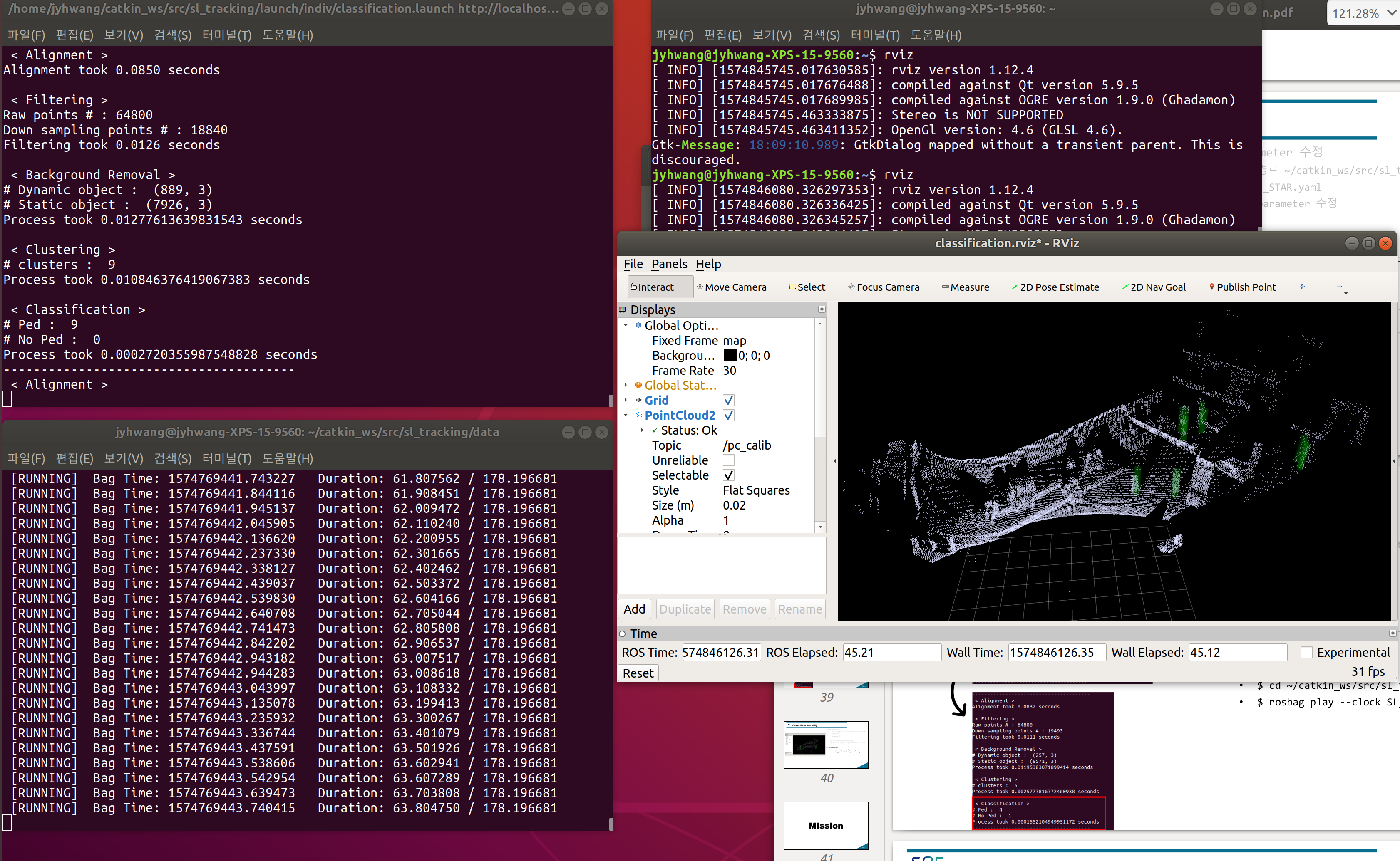
Classification
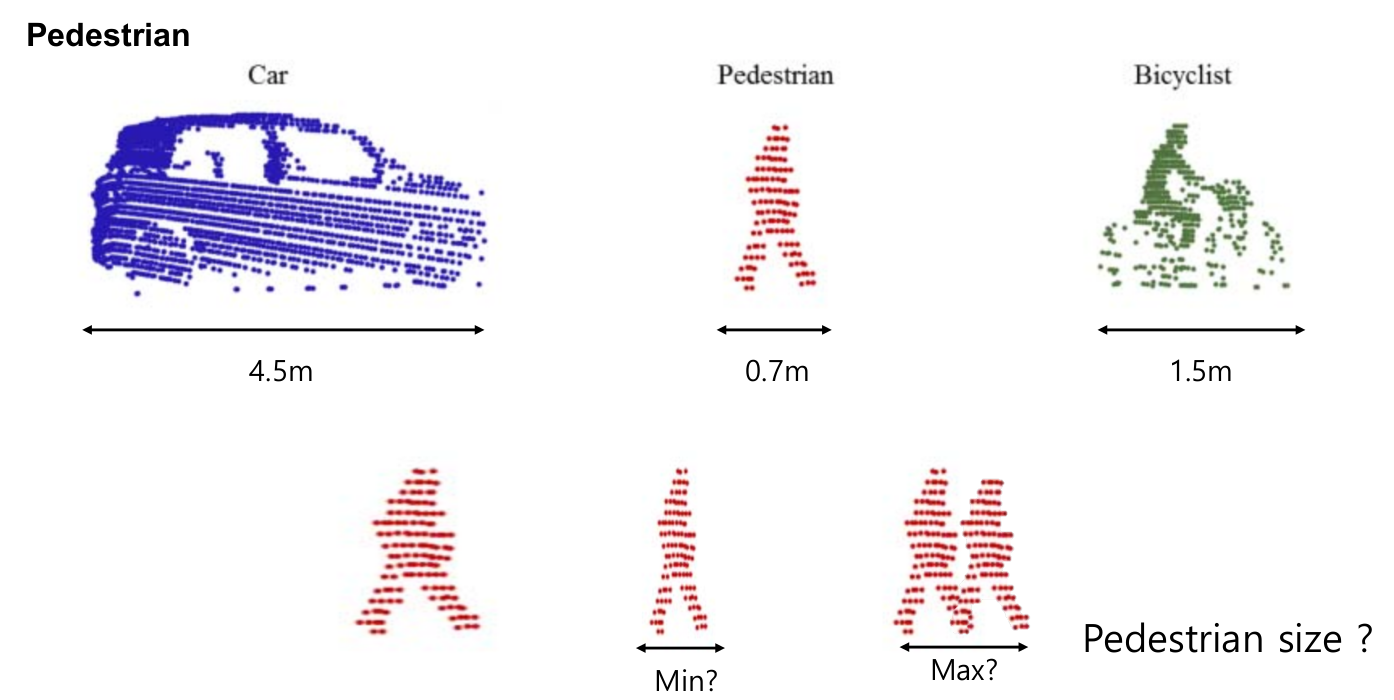
위에서 Clustering된 Object에 관하여 어떤 Class인지 구별할 수 있다.
사람의 경우 원통으로서 표시되서 보여지게 된다.
Mission
실제로 해보라고 주어진 환경은 LiDAR로서 받은 실제 Data를 Dynamic Object Detection알고리즘을 수행하여 확인하는 것 이다.
- 각각의 최적의 Parameter를 찾기위하여 Parameter가 정의된 .yaml File 변경
- LiDAR 실행하여 Data 받아오기
- Dynamic Object Detection Algorithm 적용

실습 결과에 대해서 정확한 Accuracy에 대한 평가방법이 있다면 맞추고 싶었으나, 논문이나 다른 연구에 의한 기준이 없는 경우 눈으로서 제일 판단이 잘 된다고 평가한 Parameter로서 선정하기도 한다고 한다.
코드에 문제가 있거나 궁금한 점이 있으면 wjddyd66@naver.com으로 Mail을 남겨주세요.
Leave a comment